Eliciting diverse motion trajectories in a single-material micropost
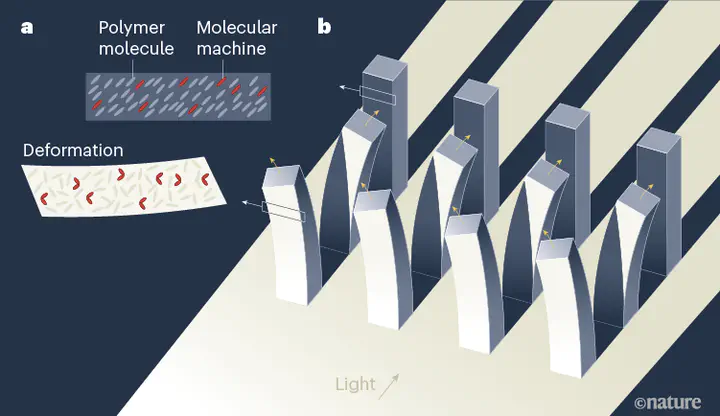 Image credit: Nature
Image credit: NatureLiquid crystalline elastomer microstructures can transform molecular alignment into complex, programmable motion. This project explores how single-material microposts can be designed to generate diverse motion trajectories, including bending, twisting, oscillatory, and non-reciprocal actuation, by encoding anisotropy across molecular, microstructural, and geometric length scales.
These systems provide a materials-based route to soft robotic motion without relying on conventional motors or multi-material assemblies. By programming internal order and responsive mechanics, we aim to create microactuators that exhibit rich, adaptive, and autonomous behaviors under external stimuli.